Localisation bio-inspirée
Aujourd’hui, s’affranchir de toute infrastructure terrestre ou satellitaire pour naviguer représente un enjeu majeur en robotique civile et militaire, non seulement en milieu urbain où les bâtiments et les gratte-ciels sont des écrans aux ondes, mais aussi en milieu plus rural où le maillage des antennes est peu dense voire inexistant, mais aussi sur différents théâtres d’opération où les infrastructures sont inopérantes, ravagées, ou bien brouillées.
Au-delà de l’intérêt militaire, la navigation dans les environnements non couvert par le GPS (pour « Global Positioning System ») ou non cartographiés représente l’un des dix plus grands défis scientifiques en robotique pour les dix prochaines années, selon la revue Science Robotics (Yang et al., 2018). Actuellement les robots mobiles terrestres utilisent une triple redondance pour se localiser : SLAM-LIDAR, SLAM stéréoscopique, GPS-IMU.
Ces travaux de recherche viseront à développer et implémenter de nouvelles stratégies biomimétiques, directement inspirée des fourmis du désert, pour le retour à la base de robots mobiles ou véhicules autonomes en environnements complexes.
A l’heure où de nombreux industriels sont aussi en train de développer des véhicules de fret autonomes en ville pour des applications de livraison au dernier kilomètre : un tel algorithme inspiré des fourmis trouverait alors tout son intérêt en milieu urbain comme étant une redondance supplémentaire au robot pour retrouver son chemin ou bien aider le robot à se localiser en ville.
Publications
- Dupeyroux, J., Viollet, S., & Serres, J. R. (2020). Bio-inspired celestial compass yields new opportunities for urban localization. In 2020 28th Mediterranean Conference on Control and Automation (MED) (pp. 881-886). IEEE.
15-18 September 2020, Saint-Raphaël, France
DOI: 10.1109/MED48518.2020.9183367 - Dupeyroux, J., Viollet, S., & Serres, J. R. (2019). An ant-inspired celestial compass applied to autonomous outdoor robot navigation. Robotics and Autonomous Systems, (117), 40-56.
DOI: 10.1016/j.robot.2019.04.007 - Serres, J. R., & Viollet, S. (2018). Insect-inspired vision for autonomous vehicles. Current opinion in insect science, (30), 46-51.
DOI: 10.1016/j.cois.2018.09.005 - Yang, G. Z., Bellingham, J., Dupont, P. E., Fischer, P., Floridi, L., Full, R., Jacobstein, N., Kumar, V., McNutt, M., Merrifield, R., Nelson, B. ., Scassellati, B., Taddeo, M., Taylor, R., Veloso, M., Wang, Z. L., & Wood, R. (2018). The grand challenges of Science Robotics. Science robotics, 3(14), eaar7650.
DOI: 10.1126/scirobotics.aar7650
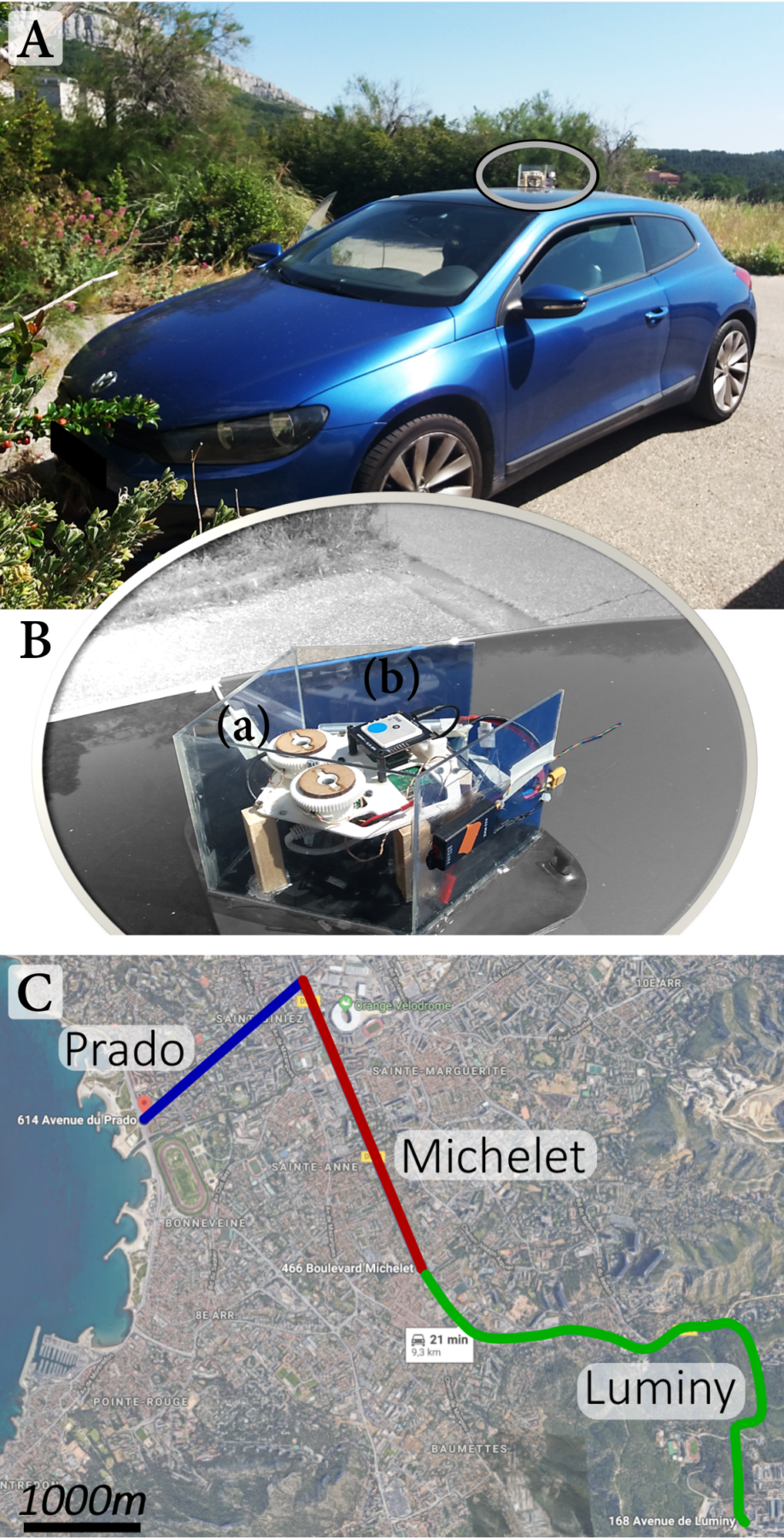
B. Vue agrandie de la boussole céleste (a) et du module GNSS (b).
C. Vue aérienne de la ville de Marseille, France, y compris la trajectoire de test qui était composée de la route de Luminy (vert), et du boulevard Michelet (rouge) et Prado (bleu). (Dupeyroux et al., IEEE MED 2020)