Le Robot Aéroglisseur LORA
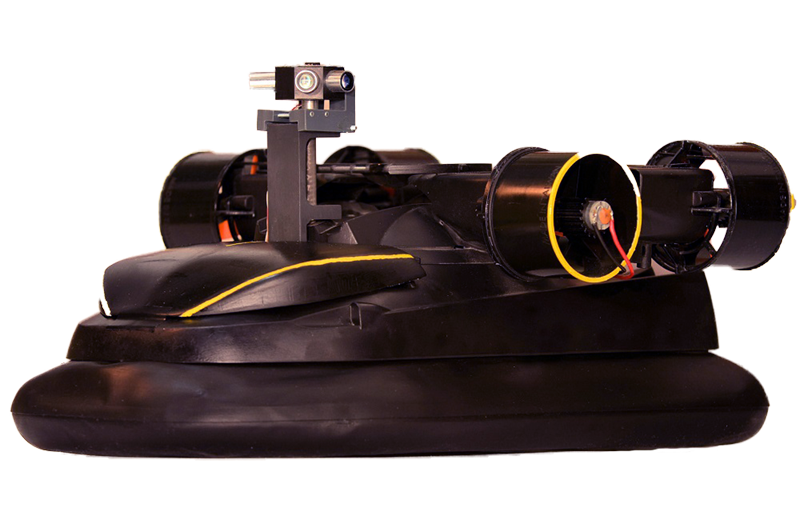
Le robot aéroglisseur LORA incarne la stratégie de guidage visuel de l’abeille dans le plan horizontal sur la base du flux optique. L’aéroglisseur miniature LORA est totalement actionné (taille : 36 x 21 x 18 cm, masse : 0,878 kg), ce qui lui permet de naviguer dans un tunnel dont la configuration géométrique lui est inconnue. L’élaboration de ce pilote automatique, dénommé LORA (Lateral Optic Flow Regulation Autopilot ), fait suite aux études comportementales menées sur l’abeille mellifère. Ces expériences comportementales ont montré que les abeilles régulent le flux optique pour voir et éviter les murs.
Le pilote automatique LORA est un double régulateur de flux optique latéral. Il repose sur deux boucles visuo-motrices interdépendantes, chacune comportant une
consigne de flux optique qui contrôle un degré de liberté du robot. La première boucle est un régulateur bilatéral de flux optique contrôlant la vitesse d’avance du robot,
alors que la seconde est un régulateur unilatéral de flux optique contrôlant la position latérale par rapport aux murs. La clé de voûte de ce système de guidage bio-inspiré est une troisième boucle destinée à maintenir le cap. Celle-ci repose sur la mesure d’un micro-gyromètre et d’un micro-compas magnétique permettant à l’aéroglisseur de se mouvoir purement en translation lors de la mesure du flux optique.
Le robot LORA est équipé d’un oeil composé biomimétique minimaliste, constitué de deux ou quatre capteurs détectant localement le flux optique selon les expérimentations et appelés aussi Détecteurs Élémentaires de Mouvement (DEM). Le système visuel de LORA comprend seulement 4 ou 8 pixels, chaque paire de pixels adjacente formant un capteur détectant le flux optique localement. Ce système visuel parcimonieux suffit au pilote automatique pour contrôler le ratio vitesse/distance aux murs, qui par définition représente le flux optique de translation, tout en contrôlant conjointement la vitesse et la position latérale du robot, sans avoir à mesurer ni estimer ces deux paramètres.
Le robot aéroglisseur LORA est ainsi capable de franchir sans collision des tunnels aux formes diverses : droit, fuselé, présentant une pente, un virage, une absence de texture sur un mur ou même une zone non-stationnaire. Il ajuste automatiquement sa vitesse d’avance et sa position latérale par rapport au mur à la façon des abeilles. Cette stratégie visuelle bio-inspirée fournit non seulement une solution de navigation élégante, en tunnel inconnu, pour des robots totalement actionnés, mais elle permet aussi d’expliquer comment une abeille de 100 mg peut naviguer avec si peu de ressources calculatoires sans recourir à l’avionique conventionnelle telle que les sonars, radars, lidars, ou les technologies GNSS (GPS, Galileo, BeiDou, GLONASS).
Publications
- Serres, J. R., & Ruffier, F. (2015). Biomimetic autopilot based on minimalistic motion vision for navigating along corridors comprising U-shaped and S-shaped turns. Journal of Bionic Engineering, 12(1), 47-60.
DOI: 10.1016/S1672-6529(14)60099-8 - Roubieu, F. L., Serres, J. R., Colonnier, F., Franceschini, N., Viollet, S., & Ruffier, F. (2014). A biomimetic vision-based hovercraft accounts for bees’ complex behaviour in various corridors. Bioinspiration & biomimetics, 9(3), 036003.
DOI: 10.1088/1748-3182/9/3/036003 - Roubieu, F. L., Serres, J. R., Franceschini, N., Ruffier, F., & Viollet, S. (2012). A fully-autonomous hovercraft inspired by bees: Wall following and speed control in straight and tapered corridors. In 2012 IEEE International Conference on Robotics and Biomimetics (ROBIO) (pp. 1311-1318). IEEE.
11-14 December 2012, Guangzhou, China
DOI: 10.1109/ROBIO.2012.6491150 - Roubieu, F. L., Serres, J. R., Viollet, S., Ruffier, F., & Franceschini, N. (2011). Toward a fully autonomous hovercraft visually guided thanks to its own bio-inspired motion sensors. In International Workshop on Bio-inspired Robots.
6-8 April 2011, Nantes, France