Le Robot Hexapode AntBot
AntBot, un robot fourmi capable de naviguer en extérieur et de manière autonome, sans GPS avec seulement 14 pixels.
Objectif du projet AntBot
L’objectif d’AntBot est de montrer qu’il est possible de naviguer de manière autonome en extérieur, sans utiliser de GPS et avec très peu de ressources tout en assurant précision, robustesse et résilience à l’égard des conditions environnementales. Ce robot insectoïde s’inspire des fourmis du désert Cataglyphis fortis à bien des égards.
Le robot AntBot a été développé dans le cadre de la thèse de Julien Dupeyroux (2015-2019, ISM – AMU/CNRS) que j’ai co-dirigé avec Stéphane Viollet. AntBot est un robot hexapode imprimé en 3D et totalement open-source.
Publications
- Dupeyroux, J., Viollet, S., & Serres, J. R. (2019). An ant-inspired celestial compass applied to autonomous outdoor robot navigation. Robotics and Autonomous Systems, (117), 40-56.
DOI: 10.1016/j.robot.2019.04.007 - Dupeyroux, J., Serres, J. R., & Viollet, S. (2019). AntBot: A six-legged walking robot able to home like desert ants in outdoor environments. Science Robotics, 4 (27), eaau0307.
DOI: 10.1126/scirobotics.aau0307 - Dupeyroux, J., Viollet, S., & Serres, J. R. (2019). Polarized skylight-based heading measurements: a bio-inspired approach. Journal of the Royal Society Interface, 16 (150), 20180878.
DOI: 10.1098/rsif.2018.0878
Mimétisme morphologique
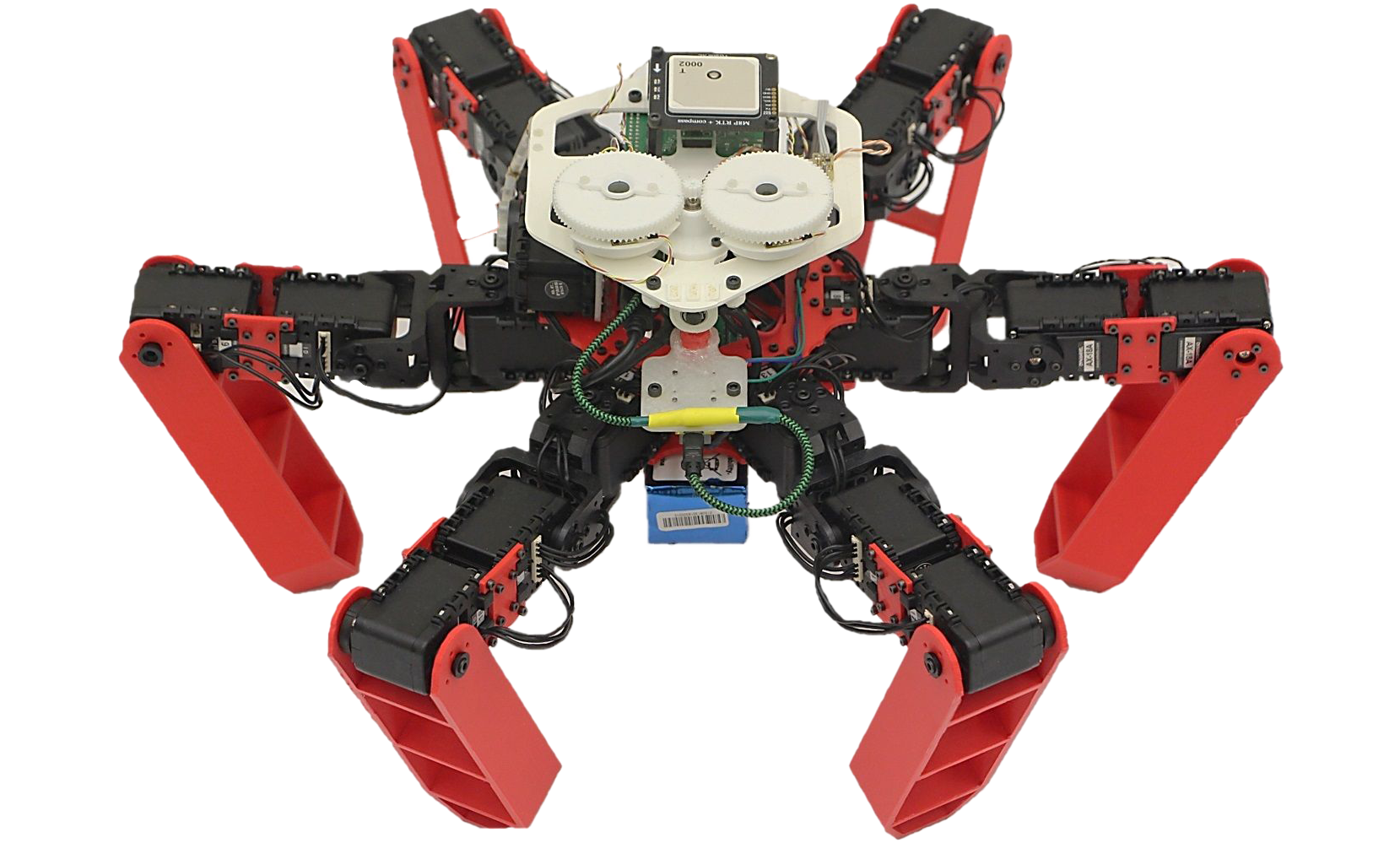
AntBot est doté de six pattes constituées de trois actionneurs chacune et permettant une locomotion tripode similaire à celle observée chez les fourmis. Le robot peut marcher avec une vitesse maximale de 90 cm/s tout en assurant une bonne stabilité en roulis et en tangage de la tête du robot.

(10 Dec. 2019)
Mimétisme sensoriel
Les fourmis du désert sont sensibles à la lumière polarisée du ciel : l’aire dorsale marginale de leur oeil composé est constitué d’ommatidies présentant une sensibilité au rayonnement polarisé de la lumière UV émanant du ciel. Cette modalité sensorielle a été reproduite sur AntBot au moyen d’une boussole céleste comprenant deux pixels sensibles à la lumière UV et surmontés de filtres polarisants linéaires rotatifs. La vision du flux optique ventral des insectes a également été reproduite sur AntBot à l’aide d’un capteur minimaliste (seulement 12 pixels) bio-inspiré et auto-adaptatif aux changements de luminosité : le capteur M²APix (Michaelis-Menten Auto-Adaptive Pixels).
Mimétisme comportemental
Afin de naviguer en toute autonomie, AntBot embarque un système de navigation directement inspiré de l’intégrateur de chemin des fourmis du désert. Ce mode de navigation vectoriel et relatif permet notamment à l’insecte de fusionner des informations de cap (vision de la lumière polarisée de la voûte céleste) et de distance (combinaison du flux optique ventral et du comptage de pas) pour estimer à chaque instant son vecteur de « homing », donnant ainsi la direction, le sens et la distance à parcourir pour retrouver le nid. Ce système a permis à AntBot de retrouver son chemin avec une erreur de positionnement de l’ordre de 5 cm après près de 14 mètres de trajectoire parcourue.
Vulgarisation scientifique
- Entretien avec Enki Bilal. Intervention de Julien Serres au festival « Oh les beaux jours ! » (2019, Juin).
- Ce petit robot qui navigue sans GPS comme une fourmi. Dupeyroux J., dans The Conversation (2019, Mai).
- AntBot : un robot fourmi autonome qui navigue sans GPS. Dupeyroux J., Serres J., & Viollet S., dans La Lettre de Grand Luminy Technopôle, no. 100 (2019, Mai).
- Un robot à pattes sans GPS. Podcast réalisé par Barbara Vignaux, Universcience – Palais des Découvertes, Cité des Sciences et de l’Industrie (2019).
- AntBot, le robot fourmi. Reportage réalisé par Nicolas Baker – CNRS, 13 février 2019.
- Quand l’intelligence artificielle s’inspire du vivant. Conférence donnée Opera Mundi par Julien Dupeyroux (Chateauneuf-le-Rouge, Novembre 2018).
- L’envolée scientifique. Documentaire réalisé par Kenza Chattar du Département SATIS (Sciences Arts et Techniques de l’Image et du Son) de la faculté des Sciences de l’Université d’Aix-Marseille (2017).


Couverture médiatique internationale
- This ant-inspired robot can navigate better than civilian GPS. Science
- AntBot makes its own way home. Nature Electronics
- A 6-legged robot stares at the sky to navigate like a desert ant. Wired
- Ant-inspired walking robot navigates without GPS by using polarized light. Digital Trends
- Robot mimics desert ants to find its way home without GPS. New Scientist
- Robot weet de weg zonder gps dankzij woestijnmier. de Volkskrant
- AntBot, un robot autonome inspiré par des fourmis du désert. Le Monde
- Un robot à pattes qui a le sens de l’orientation. Challenges
- Un capteur peu coûteux pour naviguer sans GPS. Les Echos
- C’est une innovation marquante: ce robot-fourmi s’oriente sans GPS. France Inter
- Le premier robot à pattes qui se déplace sans GPS. CNRS (communiqué de presse)
- Marseille : le robot inspiré de la fourmi du désert. La Provence
- Un robot qui se déplace sans GPS conçu à Marseille. La Marseillaise
- Voici Antbot, un robot inspiré des fourmis et qui se déplace sans GPS. Futura Sciences
- Ce robot réussit à s’orienter grâce à la lumière du soleil. Science et Vie
- AntBot : le tout premier robot évoluant sans GPS pour se repérer. Trust My Science
- France24 – Émission Tech 24 du 22 Février 2019.
- M6 – Journal télévisé 12.45 du 19 Février 2019.
- France2 – Emission Télématin du 30 Avril 2019.