Le Robot-mouche
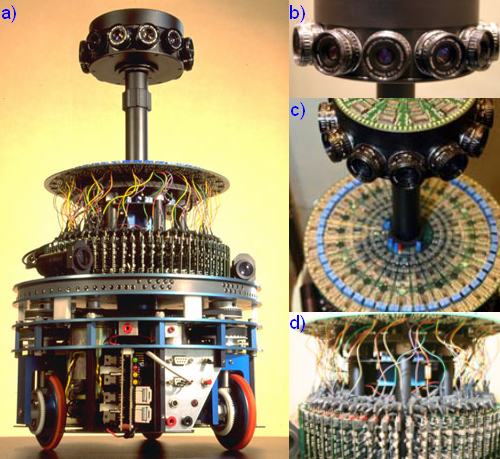
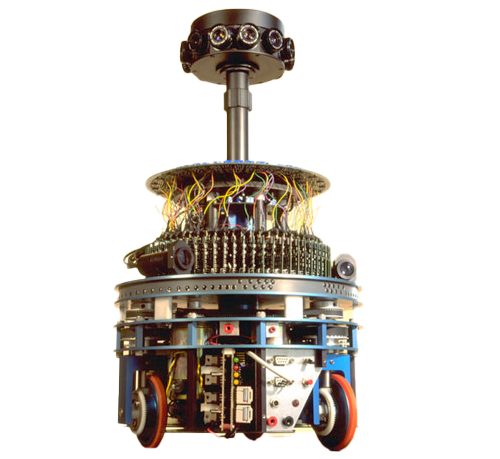
Nicolas Franceschini a consacré toute sa carrière à percer les mystères de la vision chez la mouche. En 1979, il créait son équipe de recherche en neurocybernétique après un passage de 14 ans à l’université de Tübingen en Allemagne. Cette équipe, aujourd’hui devenue Biorobotique, s’est notamment intéressée à la compréhension de la vision chez la mouche. Après 20 années de recherche, entre 1989 et 1991, le tout premier robot autonome inspiré de la mouche fût créé. Equipé de 116 détecteurs de mouvement élémentaires, le robot mouche était capable d’éviter les obstacles en les détectant par flux optique à la manière des mouches.
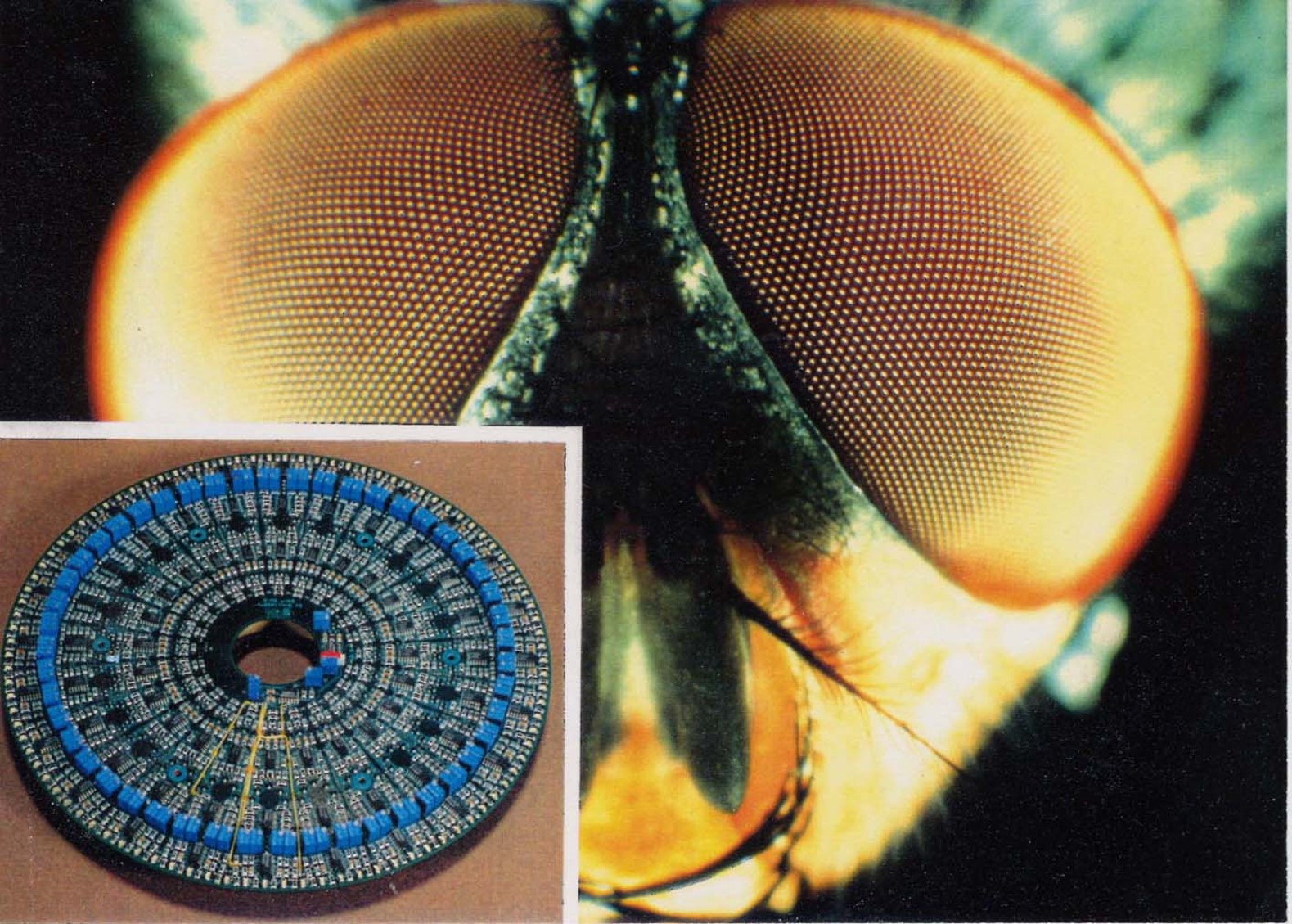
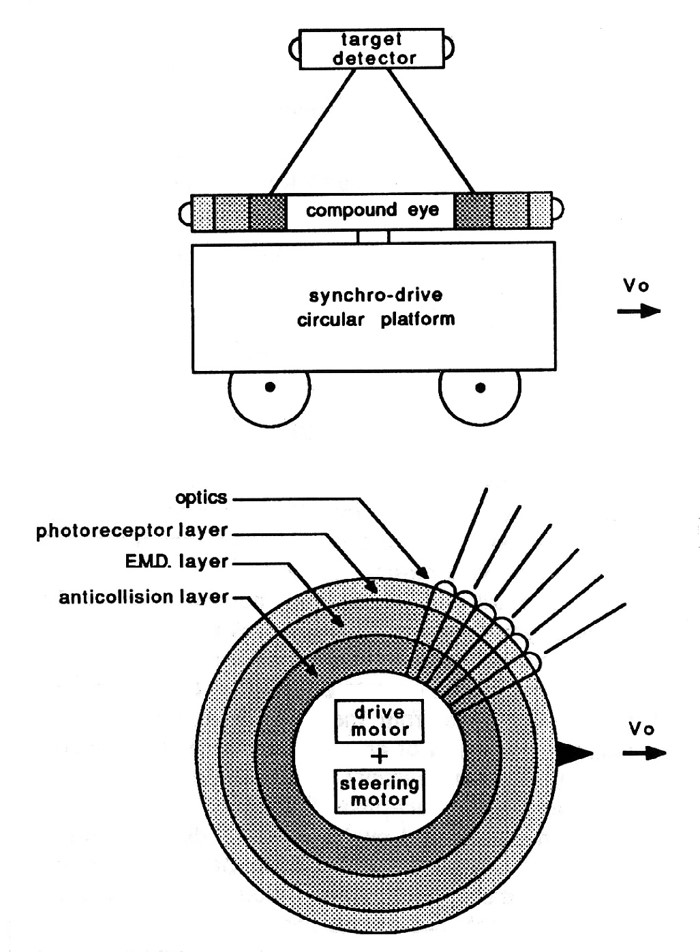
Le Robot-mouche pesait approximativement 11 kg et pouvait se déplacer avec une vitesse maximale de 50 cm/s dans un environnement encombré. L’oeil composé biomimétique panoramique, comprenant seulement 118 pixels formant 116 détecteurs élémentaires de mouvements, directement inspirés des ommatidies de l’oeil des mouches sensibles au flux optique. Cette modalité sensorielle a permis au robot mouche de réaliser des tâches de navigation par phototaxie tout en évitant des obstacles dans un environnement inconnu composé de poteaux verticaux.
Publications
- Franceschini, N. (2014). Small brains, smart machines : from fly vision to robot vision and back again. Proceedings of the IEEE, 102(5), 751–781.
- Franceschini, N., Pichon, J. M., Blanes. From insect vision to robot vision. Philosophical Transactions of The Royal Society Of London. Series B: Biological Sciences, 337(1281), 283-294.
- Franceschini, N., Pichon, J. M., & Blanes, C. (1997). Bionics of visuo-motor control. Evolutionary Robotics: From Intelligent Robots to Artificial Life, (T. Gomi, ed.), AAI Books, Ottawa, Canada, 49-67.