The Robot-fly
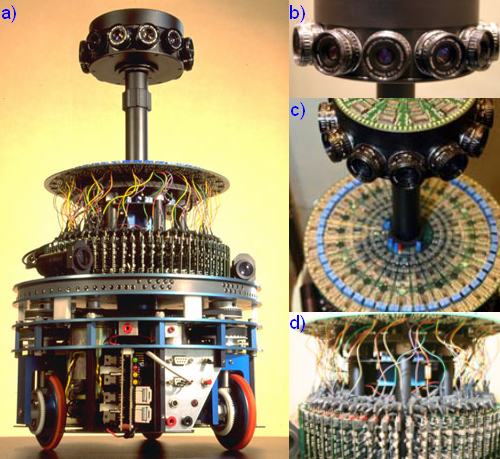
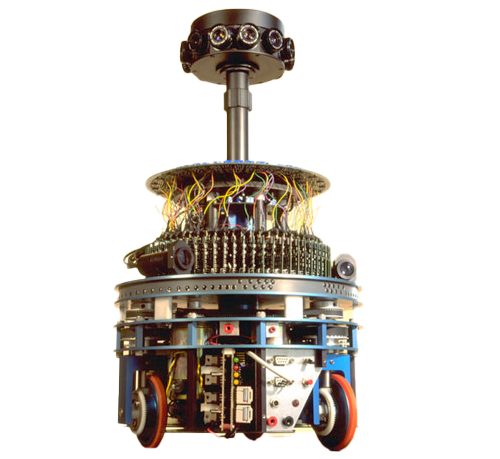
Nicolas Franceschini has devoted his entire career to unraveling the mysteries of vision in flies. In 1979, he created his research team in neurocybernetics after 14 years at the University of Tübingen in Germany. This team, which has now become Biorobotics, was particularly interested in understanding vision in flies. After 20 years of research, between 1989 and 1991, the very first autonomous robot inspired by the fly was created. Equipped with 116 elementary motion detectors, the fly robot was able to avoid obstacles by detecting them by optic flow in the manner of flies.
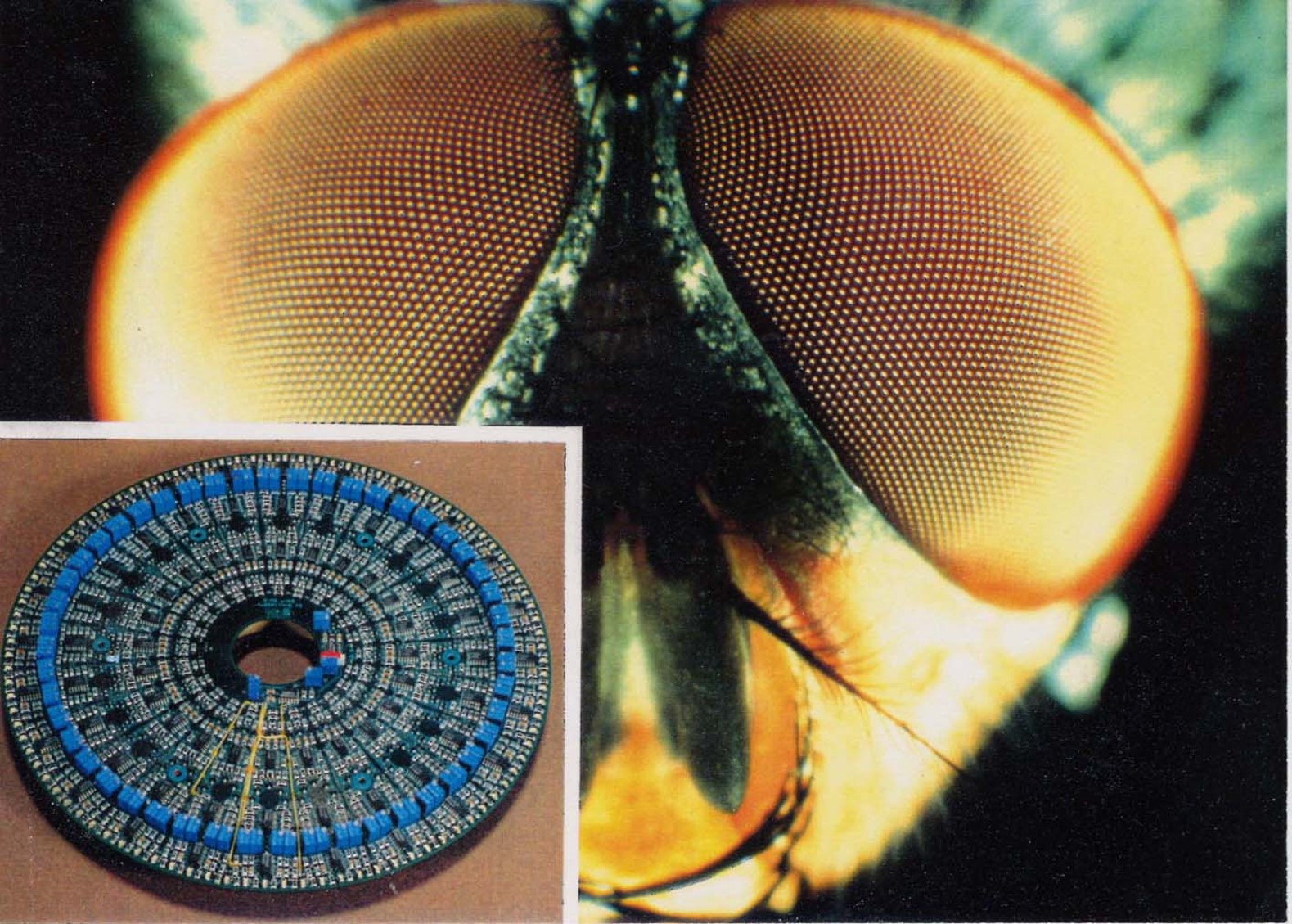
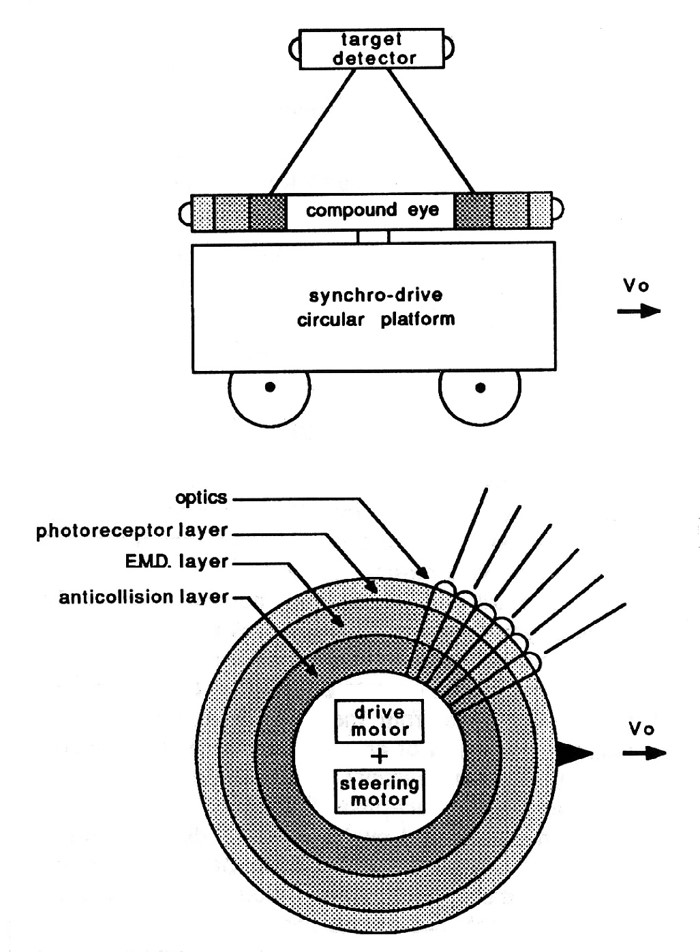
The Robot-fly weighed approximately 11 kg and could move with a maximum speed of 50 cm/s in a cluttered environment. The panoramic biomimetic compound eye, comprising only 118 pixels forming 116 elementary motion detectors, directly inspired from the optically sensitive ommatidia of the fly eye. This sensory modality allowed the fly robot to perform phototaxis navigation tasks while avoiding obstacles in an unfamiliar environment composed of poles.
Publications
- Franceschini, N. (2014). Small brains, smart machines : from fly vision to robot vision and back again. Proceedings of the IEEE, 102(5), 751–781.
- Franceschini, N., Pichon, J. M., Blanes. From insect vision to robot vision. Philosophical Transactions of The Royal Society Of London. Series B: Biological Sciences, 337(1281), 283-294.
- Franceschini, N., Pichon, J. M., & Blanes, C. (1997). Bionics of visuo-motor control. Evolutionary Robotics: From Intelligent Robots to Artificial Life, (T. Gomi, ed.), AAI Books, Ottawa, Canada, 49-67.