The X4-MaG Quadricopter Robot
The X4-MaG flying robot integrates a biomimetic and parsimonious visual system dedicated to short-range navigation by means of innovative self-adaptive visual sensors composed of only 12 pixels whose optics and phototransduction are inspired by the compound eye of the bee. Two ultra-fast optical flow measurement algorithms have been compared under ideal conditions over 5 decades of irradiance and 3 decades of optical velocity (i.e., local optical flow).
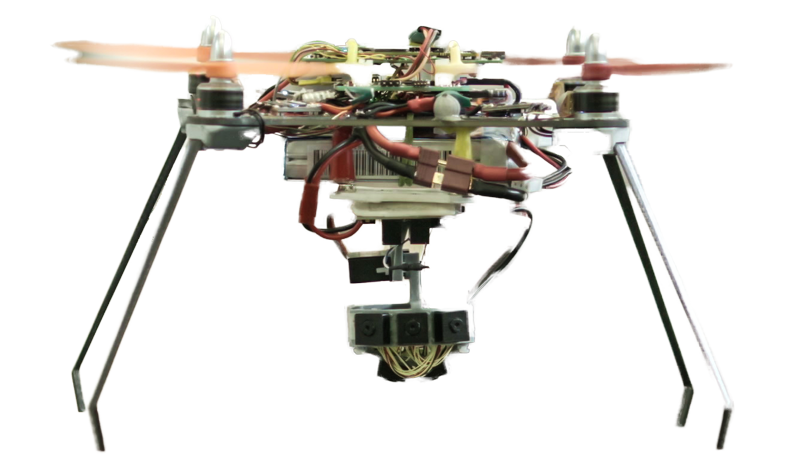
Finally, the X4-MaG robot was tested in real flight conditions in the Mediterranean Flight Arena (MVA). The computational lightness of our optical flow calculation algorithm allowed to embark it on board the X4-MaG equipped with a parsimonious visual system of 96 auto-adaptive pixels stabilized by a gondola articulated in roll and pitch to compensate for the rotations of the quadrirotor, the whole weighing approximately 400g.
The feasibility of optical flow detection on board the X4-MaG has been demonstrated in real flight conditions in the AVM. Coupled with navigation strategies inspired by the bee, this innovative visual system dedicated to the perception of movement will allow robots to navigate in cluttered environments, tunnels, or cramped places in the near future.

Publications
- Vanhoutte, E., Mafrica, S., Ruffier, F., Bootsma, R. J., & Serres, J. (2017). Time-of-travel methods for measuring optical flow on board a micro flying robot. Sensors, 17(3), 571.
- Vanhoutte, E., Ruffier, F., & Serres, J. (2017). A quasi-panoramic bio-inspired eye for flying parallel to walls. In 2017 IEEE SENSORS (pp. 1-3). IEEE.
- Vanhoutte, E., Ruffier, F., & Serres, J. (2017). A honeybee’s navigational toolkit on Board a Bio-inspired Micro Flying Robot. In IMAV 2017, International Micro Air Vehicle Conference and Competition 2017, Toulouse, France.