Le Robot Quadricoptère X4-MaG
Le robot volant X4-MaG intègre un système visuel biomimétique et parcimonieux dédié à la navigation courte portée au moyen de capteurs visuels auto-adaptatifs innovants composés de seulement 12 pixels dont l’optique et la phototransduction sont inspirées de l’oeil composé de l’abeille. Deux algorithmes ultra-rapides de mesure de flux optique ont été comparés en conditions idéales sur 5 décades d’irradiance et 3 décades de vitesses optiques (i.e., flux optique local).
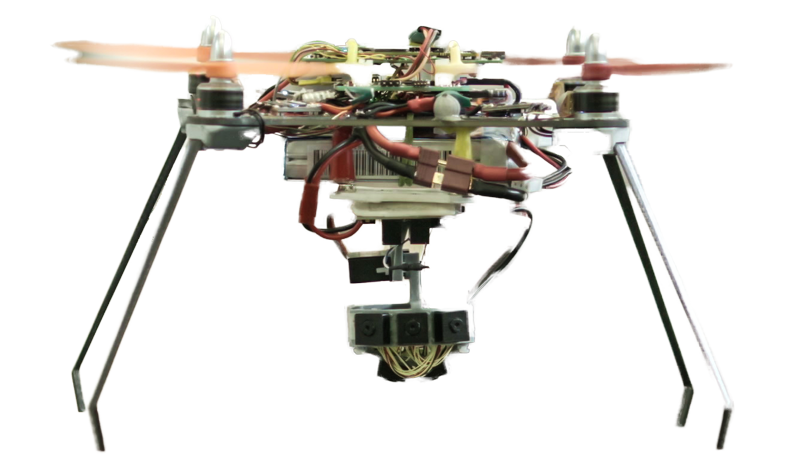
Enfin, le robot X4-MaG a été testé en conditions réelles de vol au sein de l’Arène de Vol de la Méditerranée (AVM). La légèreté calculatoire de notre algorithme de calcul du flux optique a permis de l’embarquer à bord du X4-MaG équipé d’un système visuel parcimonieux de 96 pixels auto-adaptatifs stabilisé par une nacelle articulée en roulis et tangage pour compenser les rotations du quadrirotor, le tout pesant environ 400g.
La preuve de faisabilité de la détection du flux optique à bord du X4-MaG a été démontrée en conditions réelles de vol dans l’AVM. Couplé à des stratégies de navigation inspirées de l’abeille, ce système visuel innovant dédié à la perception du mouvement permettra dans un futur proche à des robots de naviguer dans des environnements encombrés, des tunnels, ou des lieux exigus.

Publications
- Vanhoutte, E., Mafrica, S., Ruffier, F., Bootsma, R. J., & Serres, J. (2017). Time-of-travel methods for measuring optical flow on board a micro flying robot. Sensors, 17(3), 571.
- Vanhoutte, E., Ruffier, F., & Serres, J. (2017). A quasi-panoramic bio-inspired eye for flying parallel to walls. In 2017 IEEE SENSORS (pp. 1-3). IEEE.
- Vanhoutte, E., Ruffier, F., & Serres, J. (2017). A honeybee’s navigational toolkit on Board a Bio-inspired Micro Flying Robot. In IMAV 2017, International Micro Air Vehicle Conference and Competition 2017, Toulouse, France.