
#Biorobotique
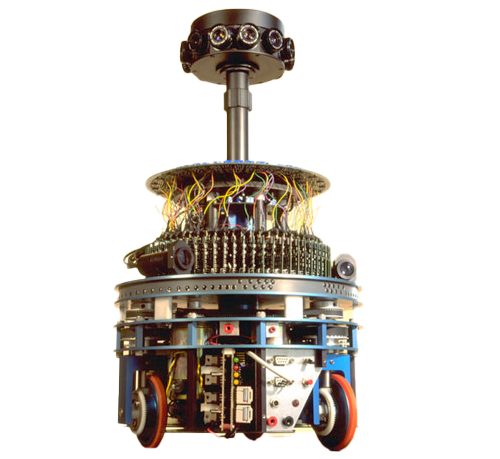
Doter de modalités sensorielles en rupture technologique, qui mieux que les animaux peuvent nous guider vers des systèmes de navigation bio-inspirés
Mes travaux de recherche portent sur la biorobotique, une discipline à l’interface entre les sciences de la vie et la robotique.
Ces travaux s’intéressent au comportement animal, la bio-inspiration, le biomimétisme, et la robotique bio-inspirée pour naviguer avec endurance et précision sans recours aux infrastructures construites par l’Homme (e.g., constellation GPS ou réseau 5G). Cela permet, non seulement d’expliquer le couplage perception – action pour comprendre les mécanismes d’orientation spatiale des animaux, mais aussi de les appliquer à la robotique.
Les humains et les animaux effectuent des tâches similaires et complexes de navigation, pourtant ils ont tous des systèmes visuels et des cerveaux extrêmement différents. Aujourd’hui, je focalise mes recherches sur les mécanismes de navigation exploitant la lumière polarisée pour inventer le système de navigation de demain.
Bande dessinée
Titre : Bug ‘N’ Robots
Date publication : 1ᵉʳ octobre 2025
Scenario : Julien Serres
Dessins et couleurs : Juliette Blanchot
Synopsis
Nous sommes en 2035, toutes les constellations de satellites de géolocalisation sont fonctionnelles, de Galileo, l’européenne, à Starlink, l’américaine. Tout fonctionne merveilleusement bien dans ce monde hyperconnecté à la 8G et au GPS, les robots vaquent à leurs occupations dans les centres urbains pour livrer des marchandises ou effectuer des relevés de terrain. Brusquement, il survient un arrêt du service de géolocalisation Starlink, mais aussi de toutes les constellations de satellites. Ils n’émettent plus de signaux les uns après les autres à cause de débris spatiaux créant une réaction en chaîne de destruction de satellites.
Les robots mobiles et autres véhicules autonomes sont alors perdus, mais observent le ballet incessant d’insectes navigateurs, au sol MiMi-Ant la fourmi, en vol Honey, l’abeille mellifère ayant l’allure d’un bolide aérien avec une verrière aérodynamique en forme de lunette de soleil chic et smart.
L’intelligence artificielle (IA) de robots convoque alors ces insectes pour apprendre et échanger des informations avec les insectes, leur expliquant comment ils font pour s’en sortir et naviguer sans la technologie humaine satellitaire, ce qui permet dans un happy end d’achever les missions en cours. L’IA est surprise par la simplicité, la frugalité, et les ingénieuses solutions intégrées dans le cerveau de ces petits animaux, qui, au départ lui apparaissaient ridicules et invisibles, ou uniquement voués à planter des graines ou produire du miel au service de l’Humanité, mais finalement perçues comme une véritable source d’inspiration pour la « Green IA » ou intelligence artificielle verte.
Actualités Toutes les actualités




Projets en Biorobotique

Projets de recherche
actuels
Projets de recherche
achevés