ECOPOL
Architecture en oxyde de zinc combinant la détection de l’ultraviolet et de la polarisation pour l’estimation du cap optique
L’objectif du projet ECOPOL est de développer un compas optique pour garantir la détection du cap lors de la navigation de robots mobiles autonomes. Actuellement, ces robots utilisent le champ magnétique ou le GNSS, mais les conditions environnementales peuvent gravement nuire à leur précision. ECOPOL introduit une troisième redondance sensorielle, inspirée des insectes, en exploitant la lumière ultraviolette polarisée du ciel. La boussole optique sera basée sur des photodétecteurs à base d’oxyde de zinc (ZnO).
Objectifs globaux, défis scientifiques et techniques
Le projet ECOPOL vise à développer une nouvelle méthode de localisation pour améliorer la navigation des robots mobiles dans des environnements complexes où les systèmes de positionnement par satellites (GNSS) ne sont pas disponibles. Cette approche bio-inspirée vise à étendre les capacités des véhicules de fret automatisés pour la livraison aux derniers kilomètres, tels que ceux commercialisés par les PME françaises TwinswHeel et Taur, qui aspirent à devenir des leaders dans ce domaine. Le manque d’infrastructures terrestres ou satellitaires est un défi majeur pour la robotique, en particulier dans les zones urbaines denses, les zones rurales avec peu d’antennes, ou les centres-villes historiques où la visibilité du ciel est limitée.
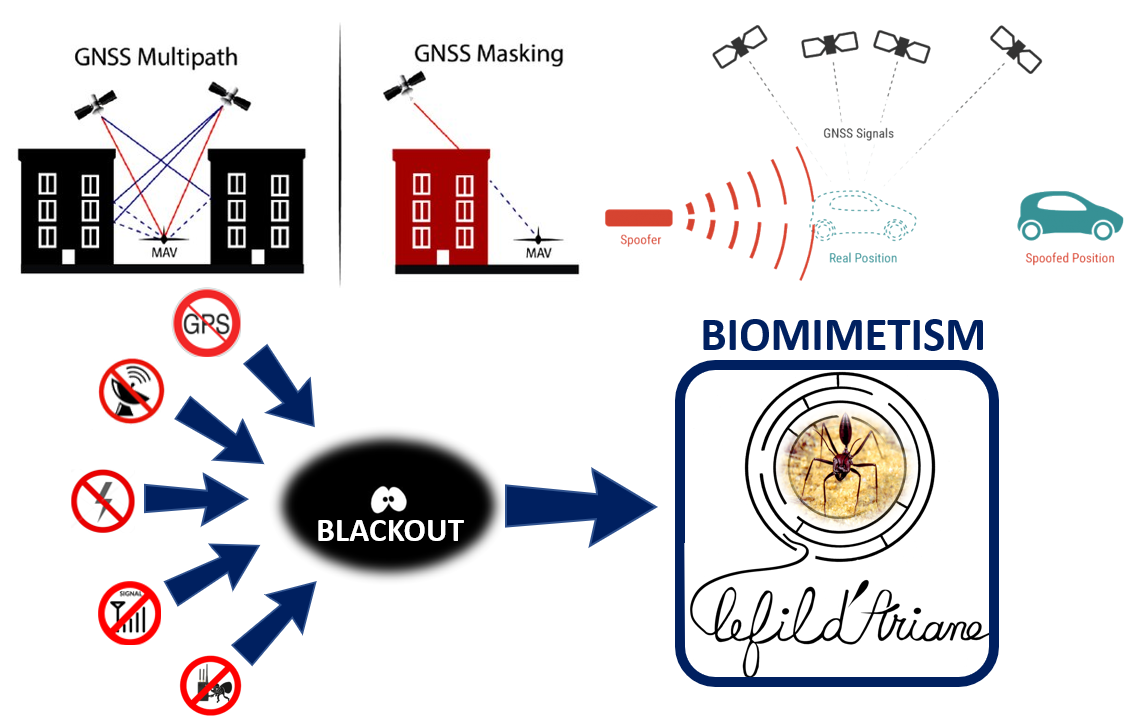
La navigation inspirée des animaux, notamment par la détection du rayonnement ultraviolet (UV) polarisé, pourrait offrir une solution furtive et résistante aux embouteillages. Les insectes, tels que les fourmis, les abeilles et les papillons, utilisent une boussole optique sensible à la polarisation de la lumière ultraviolette pour s’orienter sur de longues distances pouvant représenter plusieurs kilomètres. Le projet ECOPOL vise ainsi à concevoir une boussole optique biomimétique capable de fournir un cap absolu dans des conditions environnementales difficiles.
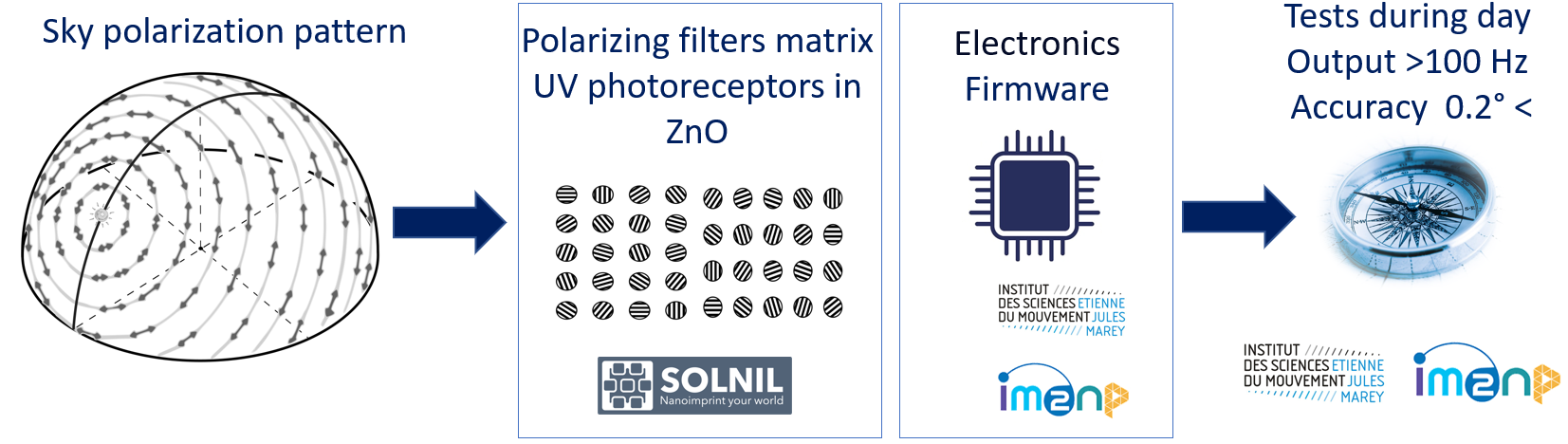
Cette boussole optique sera développée pour détecter le motif de polarisation de la lumière UV au zénith, ce qui permettra d’estimer un cap absolu par rapport au nord géographique réel. L’utilisation du rayonnement UV naturel est avantageuse, car il est peu affecté par la couverture nuageuse. Avec un nombre réduit de photorécepteurs UV, le prototype pourra estimer la polarisation avec une précision de 0,2° à 0,3° en conditions statiques, et de 0,5° en conditions dynamiques, ce qui est pertinent pour des applications en robotique civile.
Le prototype, qui coûtera moins de 1 000 euros par unité pour des séries de 100 à 10 000 pièces, sera fabriqué par SOLNIL, qui utilise des procédés de nanofabrication pour créer une micro-boussole optique intégrant des fonctions de photodétection et de polarisation. La conception nécessitera une attention particulière à l’électronique et à l’optique afin de mesurer correctement le motif de polarisation.
Des simulations préliminaires ont montré qu’un algorithme biomimétique peut estimer le cap à des fréquences supérieures à 100 Hz, en utilisant une matrice de photodétecteurs statique. Cet algorithme sera ajusté pour fournir un cap en référence au vrai nord géographique, permettant ainsi une fusion multisensorielle à bord du robot pour améliorer la précision de l’estimation du cap absolu en temps réel en ciblant une précision d’environ 0,25° dans divers contextes environnementaux.
Julien Serres, professeur des universités, depuis 2014 à l’Institut des sciences du mouvement – Étienne-Jules Marey (ISM, UMR7287), expert en capteurs optiques bio-inspirés et algorithmes de navigation biomimétique. Responsable de l’Axe Biorobotique à l’ISM.
David Duché, maître de conférences depuis 2016 à l’Institut des matériaux microélectronique nanosciences de Provence (IM2NP, UMR7334), expert en optique et photonique, et en techniques de caractérisation avancée des dispositifs optoélectroniques. Responsable de l’équipe LUMEN-PV à l’IM2NP.
Badre Kerzabi, cofondateur et PDG de SOLNIL, créée en juillet 2020 pour proposer une nouvelle génération de micro-composants optiques, SOLNIL développe des procédés et des matériaux pour la nano-fabrication à bas coût en exploitant les oxydes métalliques. Elle exploite une large gamme de céramiques (Oxydes, dont ZnO).