[Science & Vie Hors-série n°308 Juin 2023 – Spécial « Insectes »] L’inspiration derrière les robots
Article publié le 11 juillet 2023

C’est une tendance en plein essor : pour concevoir des robots capables de réaliser des tâches complexes, plusieurs équipes de chercheurs dans le monde tentent de copier… les insectes ! Explications.
Une armada de petits robots de 5 centimètres de diamètre, équipés d’un squelette extérieur et de six pattes flexibles, et capables de s’orienter tous dans une même direction.… un peu comme un essaim d’abeilles ou de criquets ! Voilà ce qu’ont réussi à développer Nicolas Bredeche, à l’Institut des systèmes intelligents et de robotique de Paris, et ses collègues, lors de travaux parus en février 2023 dans la revue scientifique Science Robotics ! « Dotés chacun d’un petit algorithme d’apprentissage dit ‘par renforcement décentralisé’, inspiré de l’apprentissage social des animaux, nos robots se sont révélés capables d’apprendre à exploiter les interactions entre eux afin de réaliser une tâche collective nécessitant la coopération de tous : ici, s’agréger dans une zone lumineuse au centre d’une arène. De quoi espérer les utiliser un jour pour réaliser des missions nécessitant l’intervention coordonnée d’un grand nombre de machines, comme surveiller la présence de ravageurs dans des cultures, détecter des fuites dans un réseau de gaz ou dépolluer les océans », s’enthousiasme Nicolas Bredeche. « Très intéressants, ces travaux illustrent une démarche en plein développement depuis quelques décennies : la robotique bio-inspirée, qui vise à concevoir des systèmes artificiels en s’inspirant des structures et des fonctions du vivant, dont notamment les insectes », commente Agnès Guillot, co-auteure de l’ouvrage « Poulpe fiction – Quand l’animal inspire l’innovation » (Éditions Dunod, 2014).
De fait, l’un des enjeux actuels de la robotique est de développer des robots plus autonomes, capables, contrairement aux robots d’usine, d’évoluer dans des milieux non contrôlés et ainsi de réaliser des tâches complexes dans des environnements accidentés, inconnus ou dangereux, comme explorer une nouvelle contrée, porter assistance à des personnes dans les ruines d’un immeuble ou faire de l’espionnage ou du renseignement militaire.
Afin de concevoir de tels robots, dès le milieu des années 1950s, beaucoup de roboticiens misent sur l’intelligence artificielle, qui vise à mimer le fonctionnement d’un cerveau humain pour doter les machines d’une certaine intelligence. Mais « à la fin des années 1980, un informaticien américain du Massachusetts Institute of Technology (MIT), Rodney Brooks, proposa une autre solution : copier les insectes en dotant les machines de petit nombre de réflexes simples plutôt que d’une architecture symbolique complexe. La robotique animale venait de naître », raconte Agnès Guillot.
De plus, à partir du milieu des années 1980, plusieurs travaux en éthologie révèlent que s’ils sont dotés individuellement d’une cognition simple, les insectes, et notamment les espèces sociales (termites, fourmis, guêpes), peuvent réaliser des tâches complexes lorsqu’ils opèrent collectivement, en essaim : construire une ruche pour les abeilles, approvisionner leur nid en nourriture pour les fourmis ou voler tous dans la même direction pour les criquets. D’où l’idée de développer des essaims de robots.
Désormais, outre Nicolas Bredeche et ses collègues, cette recherche mobilise de nombreuses autres équipes en France. Même l’agence spatiale américaine, la Nasa, s’y est mise ! En 2018, elle a annoncé son projet de développer une colonie de petits robots volants hybrides appelés Marsbees (« abeilles de Mars »), destinés à accélérer l’exploration de Mars. « Nos résultats numériques préliminaires suggèrent qu’un bourdon avec une aile de cigale peut générer une portance suffisante pour planer dans l’atmosphère martienne », précisait alors Chang-kwon Kang, ingénieur aérospatial à l’Université d’Alabama.
Mais, il n’y a pas que le comportement en essaims : d’autres caractéristiques des insectes intéressent les roboticiens : « leurs modes de locomotion très diversifiés, sachant qu’ils peuvent voler, marcher, sauter ou ramper ; leurs équipements sensoriels, comme leurs organes de la vision, leurs antennes ou les soies qui recouvrent certaines parties de leur corps et leur permettent de détecter des variations de tension ou de vibrations dans leur environnement et ainsi, par exemple, de percevoir un potentiel danger ; ou encore leur résilience, à savoir leur capacité à poursuivre leurs tâches, malgré un membre cassé ou la déficience d’un individu de l’essaim », énumère Jean-Baptiste Mouret, informaticien spécialiste en robotique, au centre Inria de Nancy.
En plus des résultats obtenus récemment par l’équipe de Nicolas Bredeche, ces dernières années, la robotique inspirée des insectes a enregistré plusieurs autres beaux succès. Ainsi, en 2015, l’équipe de Jean-Baptiste Mouret a fait la couverture de la revue scientifique Nature après avoir réussi à développer un robot à six pattes, qui a pu continuer à marcher malgré un membre cassé. Plus récemment, lors de travaux décrits en 2019 dans Science Robotics, Julien Serres, bioroboticien et son équipe à Aix Marseille Université, ont mis au point un autre robot à six pattes, baptisé AntBot, capable lui, de se déplacer sans GPS… comme la fourmi du Sahara Cataglyphis ! « Cet insecte peut parcourir jusqu’à 1 km pour trouver de la nourriture puis regagner son nid, grâce à deux instruments de navigation logés dans ses yeux : une « boussole céleste », qui lui permet de s’orienter grâce à la lumière ultraviolette polarisée émise par le ciel ; et sa rétine permettant de mesurer le défilement optique du sol, et ainsi d’estimer de façon fiable la distance parcourue en la combinant avec le comptage du nombre de pas effectués. D’où l’idée d’intégrer dans notre robot deux capteurs bio-inspirés mimant ce double instrument de navigation », développe Julien Serres. À l’avenir, précise-t-il, « ce nouveau système de guidage sans GPS pourrait être utilisé pour le déplacement de robots sur Mars où le GPS n’existe pas ; pour la livraison précise de colis en ville par des robots, sa marge d’erreur étant de seulement 5 cm contre 1 et 2,5 mètres pour les GPS militaire et civil, respectivement ; ou en cas de coupure généralisée l’électricité, puisque notre boussole fonctionne sans besoin d’être connecté à l’Internet ».
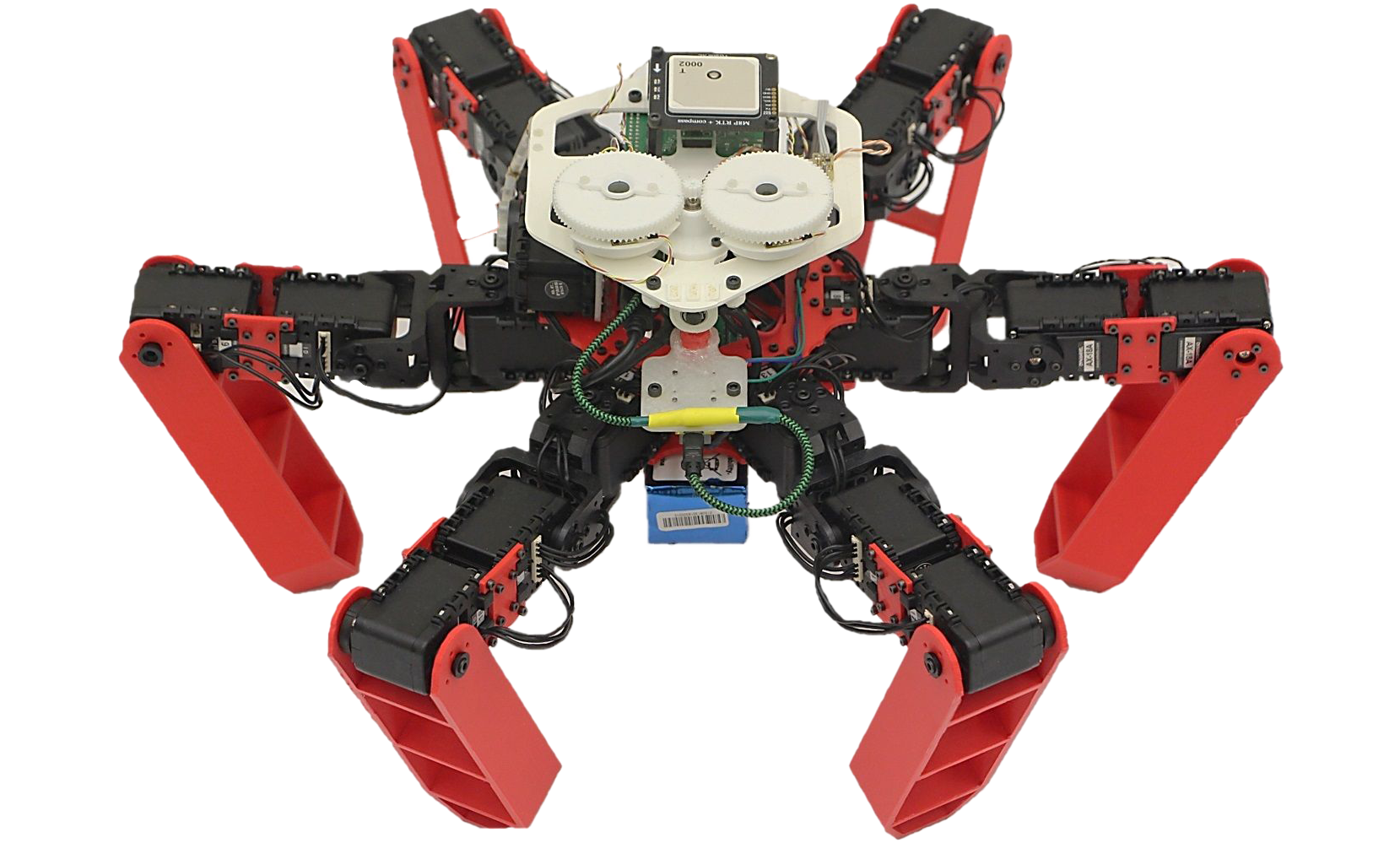
Le robot hexapode AntBot, un robot fourmi capable de naviguer en extérieur et de manière autonome, sans GPS avec seulement 14 pixels. Sciences Robotics (2019)
Reste qu’avant de voir ce type de rêves devenir réalité, les ingénieurs devront dépasser plusieurs obstacles… Par exemple, explique Nicolas Bredeche, « encore très simples, nos robots ne se déplacent pas rapidement et avancent seulement en deux dimensions – et non trois -, la plupart du temps ». Ensuite, se pose aussi la difficulté de la faible autonomie énergétique des prototypes à pattes actuels : « AntBot ne peut fonctionner que 15 minutes avant de s’arrêter en conditions standards de température (25°C) ; et ce, seulement sur un terrain plat. Alors qu’une fourmi du désert peut marcher plusieurs heures dans un milieu chaud (50 à 70°C) et plus accidenté… », illustre Julien Serres.
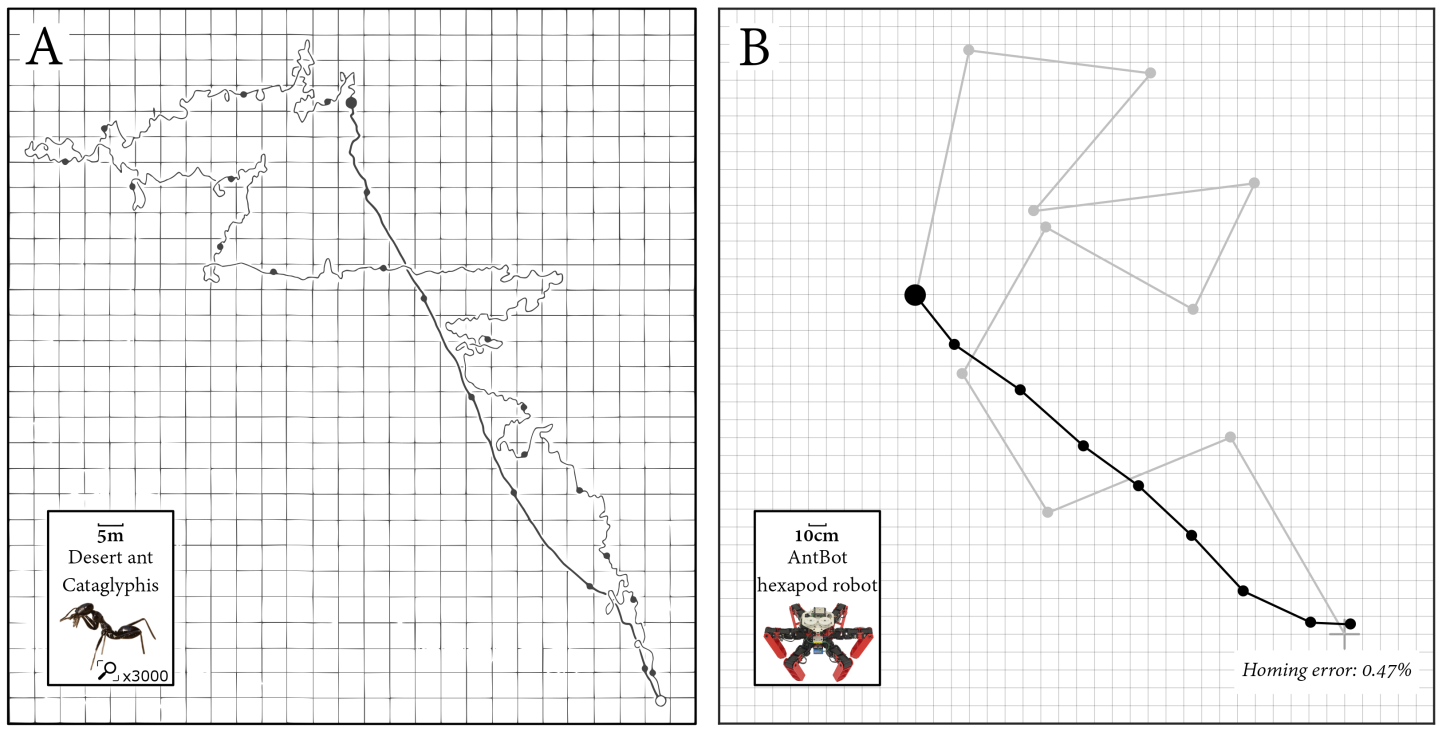
Naviguer avec l’intégrateur optique de chemin à la façon des fourmis du Sahara. (A) Performances de la fourmi du désert Cataglyphis fortis. (B) Performance du robot AntBot équipé des mêmes modalités sensorielles que la fourmi. Sciences Robotics (2019)
Ceci dit, Nicolas Bredeche en est convaincu : « si le besoin en robots insectes se fait ressentir et qu’il y a une rencontre rapide entre les industriels et les chercheurs académiques travaillant dans ce domaine, cette recherche pourrait avancer vite ! »