ECOPOL
Zinc oxide architecture combining ultraviolet and polarization detection for optical heading estimation
The aim of the ECOPOL project is to develop an optical compass to guarantee heading detection when navigating autonomous mobile robots. Currently, these robots use magnetic field or GNSS, but environmental conditions can severely hamper their accuracy. ECOPOL introduces a third, insect-inspired redundancy, exploiting polarized ultraviolet light from the sky. The optical compass will be based on zinc oxide photodetectors.
Global objectives, scientific/technical challenges
The ECOPOL project aims to develop a new localization method to improve the navigation of mobile robots in complex environments where Global Navigation Satellite System (GNSS) is not available. This bio-inspired approach aims to extend the capabilities of automated cargo vehicles, such as those marketed by French SMEs TwinswHeel and Taur, which aspire to become leaders in this field. The lack of terrestrial or satellite infrastructure is a major challenge in robotics, particularly in dense urban areas, rural areas with few antennas, or historic city centers where visibility of the sky is limited.
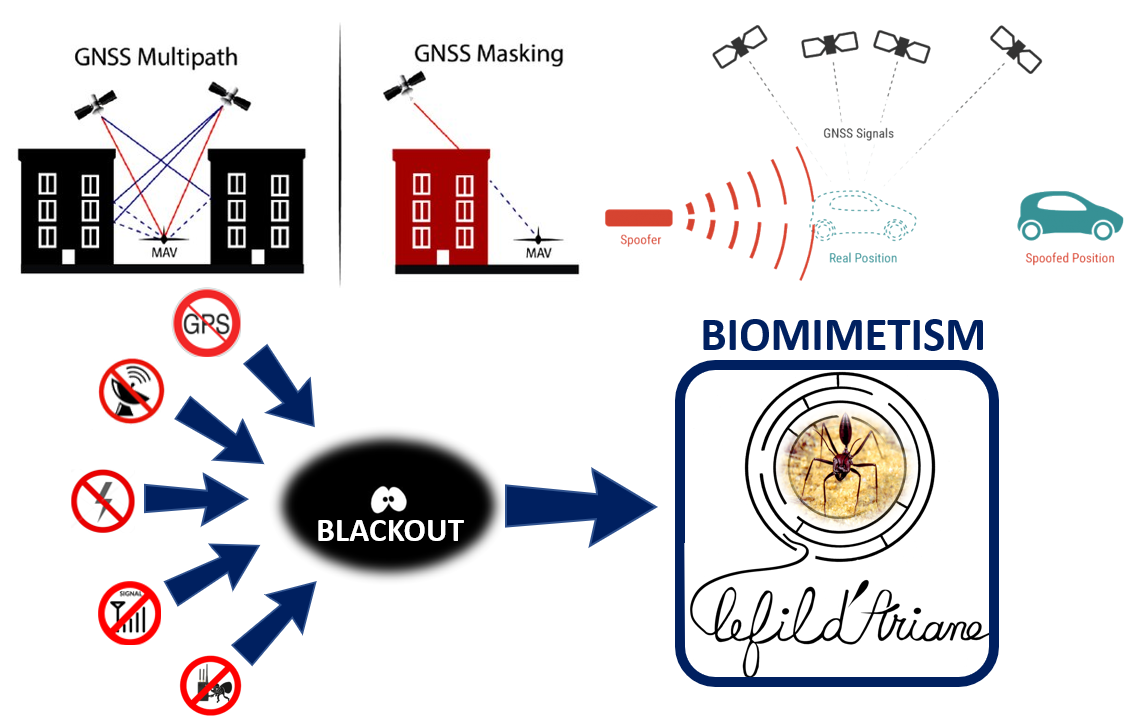
Life-inspired navigation, in particular through the detection of polarized ultraviolet (UV) radiation, could offer a stealthy, jam-resistant solution. Insects, such as ants, bees and butterflies, use an optical compass sensitive to the polarization of UV light to navigate over long distances. The ECOPOL project aims to design a biomimetic optical compass capable of providing an absolute heading under difficult environmental conditions.
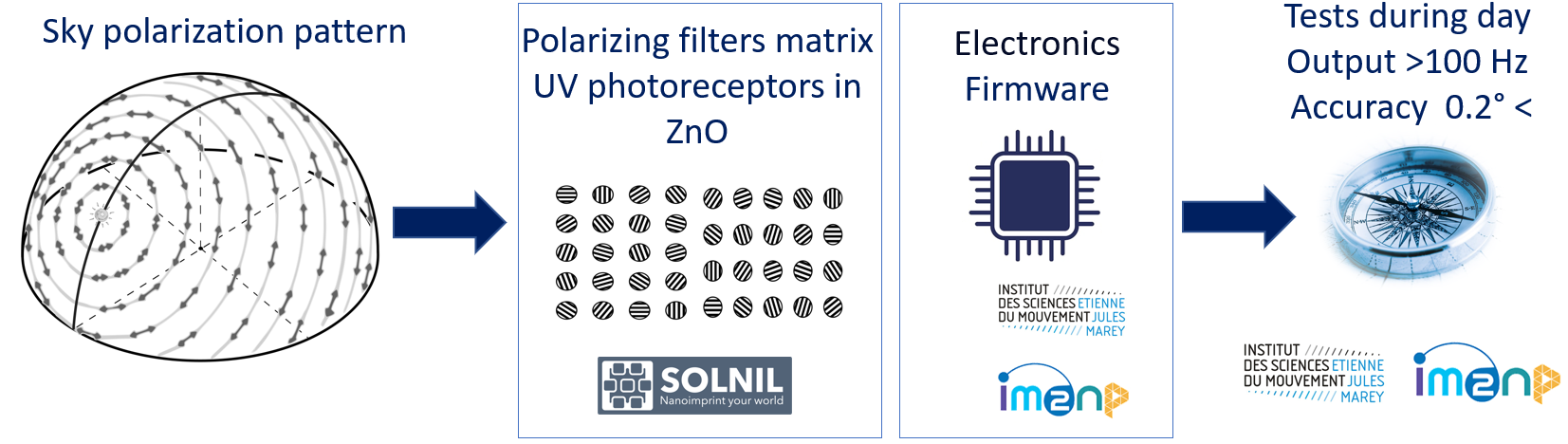
This optical compass will be developed to detect the polarization pattern of UV light at the zenith, enabling an absolute heading referenced to true geographic north to be estimated. The use of natural UV radiation is advantageous because it is little affected by cloud cover. With a reduced number of UV photoreceptors, the prototype will be able to estimate polarization with an accuracy of 0.2° to 0.3° in static conditions, and 0.5° in dynamic conditions, which is adequate for civil applications.
The prototype, which will cost less than €1,000 per unit for series of 100 to 10,000, will be manufactured by SOLNIL, which uses nano-fabrication processes to create a micro optical compass integrating photodetection and polarization functions. The design will require careful attention to electronics and optics to correctly measure the polarization pattern.
Preliminary simulations have shown that a biomimetic algorithm can estimate heading at frequencies above 100 Hz, using a static optical sensor. This model will be adjusted to provide a heading in reference to true north, enabling multisensory fusion onboard the robot and thus improving the accuracy of absolute heading estimation in real time, with a precision of around 0.25° in various environmental contexts.
Julien Serres, Full Professor since 2014 at the Institute of Movement Sciences – Étienne-Jules Marey (ISM, UMR7287), expert in bio-inspired optical sensors and biomimetic navigation algorithms. Head of the Biorobotics department at ISM.
David Duché, Senior Lecturer since 2016 at the Institute of Materials Microelectronics Nanosciences of Provence (IM2NP, UMR7334), expert in optics and photonics, and advanced characterization techniques for optoelectronic devices. Head of the LUMEN-PV department at IM2NP.
Badre Kerzabi, co-founder and CEO of SOLNIL, created in July 2020 to offer a new generation of optical micro-components, SOLNIL develops processes and materials for low-cost nano-fabrication by exploiting metal oxides. It exploits a broad range of ceramics (Oxides, including ZnO)